Download Source Code
RadarSimNb is a repository containing Jupyter Notebooks that provide detailed, hands-on examples for using RadarSimPy. These notebooks serve as a practical guide to help you get started quickly and effectively. Explore the examples below to dive in!
FMCW Radar Link Budget (Mesh Target)
This post continues our discussion on FMCW radar link budget analysis, moving from a point target to…
Read More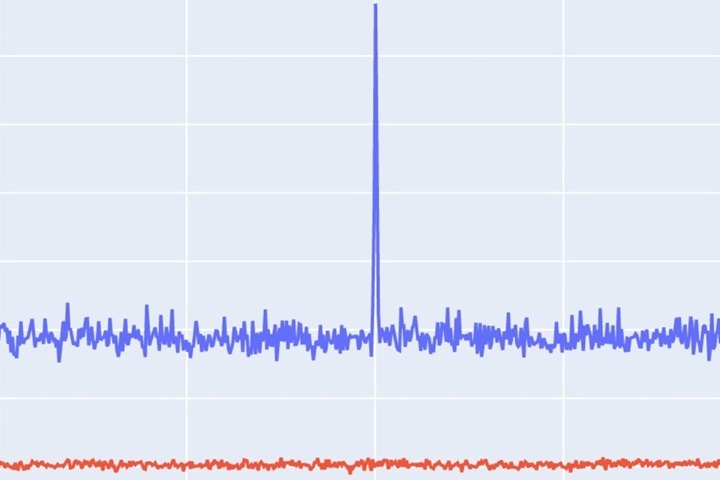
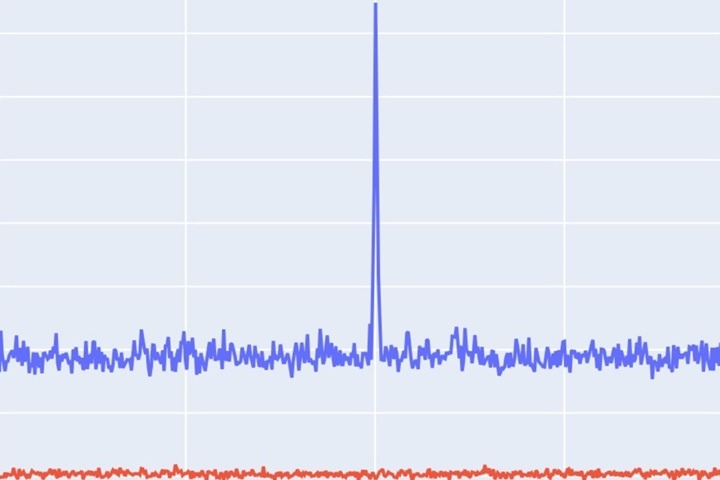
FMCW Radar Link Budget (Point Target)
Radar link budget analysis is a critical process for determining the power levels throughout the rad…
Read More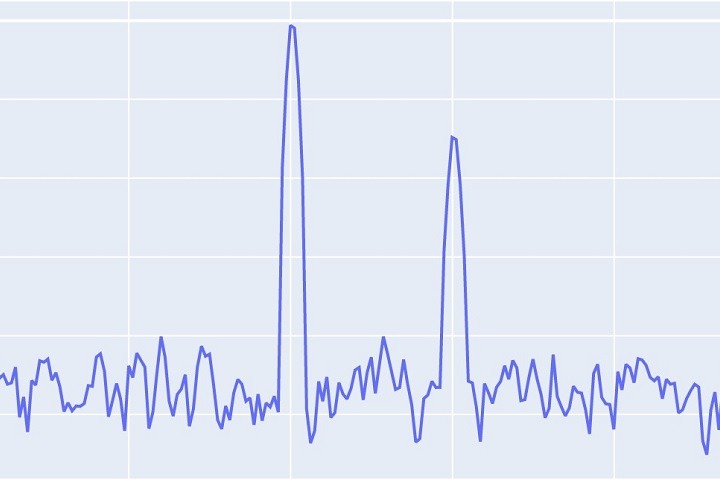
Pulsed Radar
Pulsed radar transmits short, intense radio pulses to detect and track objects by measuring the time…
Read More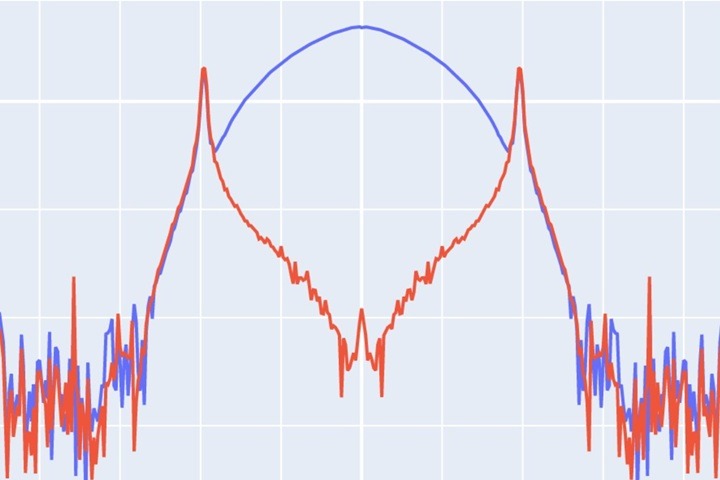
Cross-Polarization and Co-Polarization RCS
In this example, we demonstrate how the RadarSimPy framework can be applied to derive the Cross-Pola…
Read More
Interferometric Radar
Consider utilizing RadarSimPy for a simulation example involving interferometric radar. This simulat…
Read More
Interference
In this illustrative example, we will showcase the process of configuring an interference radar with…
Read More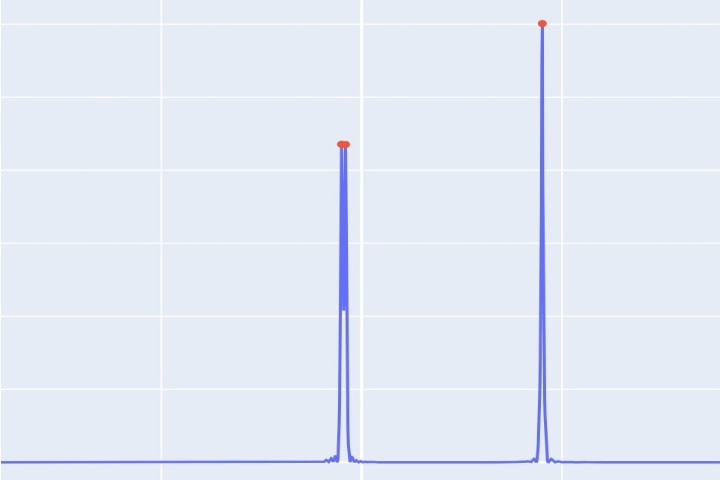
DoA Estimation
RadarSimPy boasts a comprehensive collection of prevalent DoA algorithms and beamformers within its …
Read More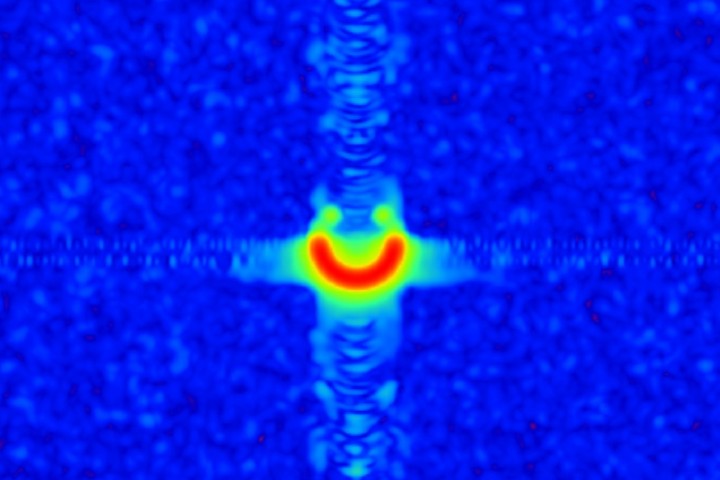
Imaging Radar
This illustration serves as a prime example of employing ray tracing to simulate the response of a M…
Read More
Multi-Path Effect
In this example, we will employ RadarSimPy's ray tracing capabilities to demonstrate how vertical mu…
Read More